MA Model#
by Professor Throckmorton
for Time Series Econometrics
W&M ECON 408/PUBP 616
Slides
Wold Representation Theorem#
Wold representation theorem: any covariance stationary series can be expressed as a linear combination of current and past white noise.
\[ y_t = \sum_{i=0}^\infty b_i \varepsilon_{t-i} \]\(\varepsilon_t\) is a white noise process with mean 0 and variance \(\sigma^2\).
\(b_0 = 1\), and \(|\sum_{i=0}^\infty b_i | < \infty\), which ensures the process is stable.
\(\varepsilon_t\), a.k.a. an innovation, represents new information that cannot be predicted using past values.
Key aspects#
Generality: The Wold Representation is a general model that can represent any covariance stationary time series. This is why it is important for forecasting.
Linearity: The representation is a linear function of its innovations or “general linear process”.
Zero Mean: The theorem applies to zero-mean processes, but this is without loss of generality because any covariance stationary series can be expressed in deviations from its mean, \(y_t-\mu\).
Innovations: The Wold representation expresses a time series in terms of its current and past shocks/innovations.
Approximation: In practice, because an infinite distributed lag isn’t directly usable, models like moving average (MA), autoregressive (AR), and autoregressive moving average (ARMA) models are used to approximate the Wold representation.
MA Model#
The moving average (MA) model expresses the current value of a series as a function of current and lagged unobservable shocks (or innovations)
The MA model of order \(q\), denoted as MA(\(q\)), is defined as:
\[ y_t = \mu + \varepsilon_t + \theta_1 \varepsilon_{t−1} + \theta_2 \varepsilon_{t−2} + ... + \theta_q \varepsilon_{t−q} \]\(\mu\) is the mean or intercept of the series.
\(\varepsilon_t\) is a white noise process with mean 0 and variance \(\sigma^2\).
\(\theta_1,\theta_2,\ldots,\theta_q\) are the parameters of the model.
Key aspects#
Stationarity: MA models are always stationary.
Approximation: Finite-order MA processes are a natural approximation to the Wold representation, which is MA(\(\infty\)).
Autocorrelation: The ACF of an MA(\(q\)) model cuts off after lag \(q\), i.e., the autocorrelations are zero beyond displacement \(q\). This is helpful in identifying a suitable MA model for time series data.
Forecasting: MA models are not forecastable more than \(q\) steps ahead, apart from the unconditional mean, \(\mu\).
Invertibility: An MA model is invertible if it can be expressed as an autoregressive model with an infinite number of lags.
Unconditional Moments#
The variance of an MA process depends on the order of the process and the variance of the white noise, \(\varepsilon_t \overset{i.i.d.}{\sim} N(0,\sigma^2)\)
MA(\(1\)) Process: \(y_t = \mu + \varepsilon_t + \theta\varepsilon_{t-1}\)
\(E(y_t) = \mu + E(\varepsilon_t) + \theta E(\varepsilon_{t-1}) = \mu\)
\(Var(y_t) = Var(\varepsilon_t) + \theta^2 Var(\varepsilon_{t-1}) = \sigma^2(1 + \theta^2)\)
\(Std(y_t) = \sqrt{\sigma^2(1 + \theta^2)}\)
MA(\(q\)) Process: \(y_t = \mu + \varepsilon_t + \theta_1\varepsilon_{t-1} + \dots + \theta_q\varepsilon_{t-q}\)
\(E(y_t) = \mu\)
\(Var(y_t) = \sigma^2(1 + \theta_1^2 + \dots + \theta_q^2)\)
\(Std(y_t) = \sqrt{Var(y_t)}\)
Autocorrelation Function#
MA(\(1\)) Process: \(y_t = \mu + \varepsilon_t + \theta\varepsilon_{t-1}\)
\(\gamma(0) = E[(y_t-\mu)(y_t-\mu)] = Var(y_t) = \sigma^2(1 + \theta^2)\)
\(\gamma(1) = E[(y_t-\mu)(y_{t-1}-\mu)]\)
\[\begin{align*} &= E[(\varepsilon_t + \theta\varepsilon_{t-1})(\varepsilon_{t-1} + \theta\varepsilon_{t-2})] \\ &= E[\varepsilon_t\varepsilon_{t-1} + \varepsilon_t\theta\varepsilon_{t-2} + \theta\varepsilon_{t-1}\varepsilon_{t-1} + \theta\varepsilon_{t-1}\theta\varepsilon_{t-2}] \\ &= \theta E[\varepsilon_{t-1}^2] = \theta Var[\varepsilon_{t-1}] \\ &= \theta\sigma^2 \end{align*}\]\(\gamma(\tau) = 0\) for \(|\tau| > 1\)
\(\rho(0) = 1\), i.e., any series is perfectly correlated with itself
\(\rho(1) = \gamma(1)/\gamma(0) = \theta/(1 + \theta^2)\)
\(\rho(\tau) = 0\) for \(|\tau| > 1\)
MA(\(q\)) process: \(y_t = \varepsilon_t + \theta_1\varepsilon_{t-1} + \dots + \theta_q\varepsilon_{t-q}\)
\(\rho(0) = 1\)
\(\rho(k) = \frac{\theta_k + \sum_{i=1}^{q-k} \theta_i\theta_{i+k}}{1 + \sum_{i=1}^{q} \theta_i^2}\) for \(1 \le k \le q\)
\(\rho(\tau) = 0\) for \(|\tau| > q\)
MA Model as DGP#
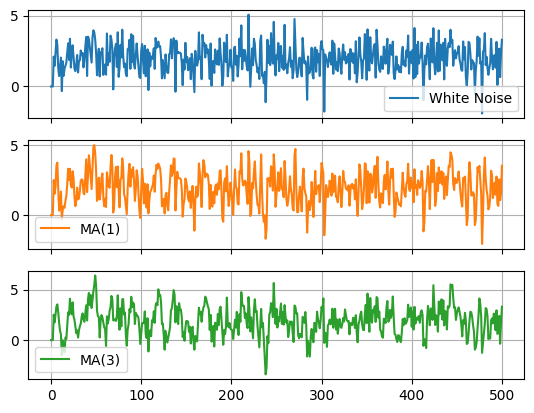
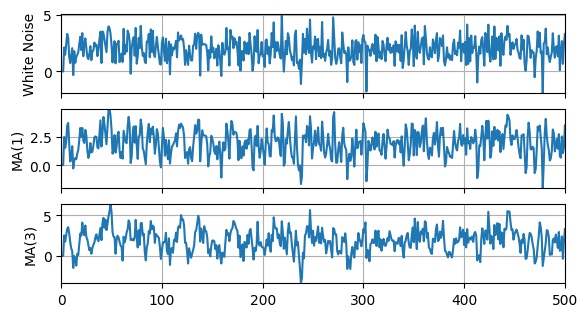
Let’s compare a couple different MA models to their underlying white noise.
White noise:
MA(1):
MA(3):
# Import libraries
# Plotting
import matplotlib.pyplot as plt
# Scientific computing
import numpy as np
# Data analysis
import pandas as pd
DIY simulation#
# Assign parameters
T = 501; mu = 2; theta1 = 0.6; theta2 = 0.5; theta3 = 0.7;
# Draw random numbers
rng = np.random.default_rng(seed=0)
eps = rng.standard_normal(T)
# Simulate time series
y = np.zeros([T,3])
for t in range(3,T):
y[t,0] = mu + eps[t]
y[t,1] = mu + eps[t] + theta1*eps[t-1]
y[t,2] = (mu + eps[t] + theta1*eps[t-1]
+ theta2*eps[t-2] + theta3*eps[t-3])
# Convert to DataFrame and plot
df = pd.DataFrame(y)
df.columns = ['White Noise','MA(1)','MA(3)']
df.plot(subplots=True,grid=True)
array([<Axes: >, <Axes: >, <Axes: >], dtype=object)
# Plot variables
fig, axs = plt.subplots(len(df.columns),figsize=(6.5,3.5))
for idx, ax in enumerate(axs.flat):
col = df.columns[idx]
y = df[col]
ax.plot(y); ax.set_ylabel(col)
ax.grid(); ax.autoscale(tight=True); ax.label_outer()
print(f'{col}: \
E(y) = {y.mean():.2f}, \
Std(y) = {y.std():.2f}, \
AC(y) = {y.corr(y.shift(1)):.2f}')
White Noise: E(y) = 1.96, Std(y) = 1.03, AC(y) = -0.01
MA(1): E(y) = 1.95, Std(y) = 1.18, AC(y) = 0.43
MA(3): E(y) = 1.92, Std(y) = 1.43, AC(y) = 0.58
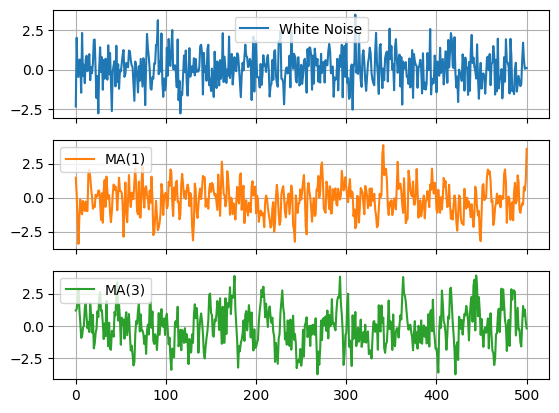
Using statsmodels#
# ARIMA Process
from statsmodels.tsa.arima_process import ArmaProcess as arma
# Set rng seed
rng = np.random.default_rng(seed=0)
# Create models (coefficients include zero lag)
wn = arma(ma=[1]);
ma1 = arma(ma=[1,theta1])
ma3 = arma(ma=[1,theta1,theta2,theta3])
# Simulate models
y = np.zeros([T,3])
y[:,0] = wn.generate_sample(T)
y[:,1] = ma1.generate_sample(T)
y[:,2] = ma3.generate_sample(T)
# Convert to DataFrame
df = pd.DataFrame(y)
df.columns = ['White Noise','MA(1)','MA(3)']
df.plot(subplots=True,grid=True)
array([<Axes: >, <Axes: >, <Axes: >], dtype=object)
# Auto-correlation function
from statsmodels.graphics.tsaplots import plot_acf as acf
# Plot Autocorrelation Function
fig, ax = plt.subplots(figsize=(6.5,1.5))
acf(df['MA(3)'],ax)
ax.grid(); ax.autoscale(tight=True);
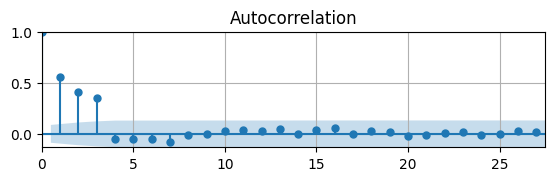
Since the DGDP is an MA(3), the ACF shows the correlations are only significant for the first 3 lags.
Estimating MA Model#
In an MA model, the current value is expressed as a function of current and lagged unobservable shocks.
However, the error terms are not observed directly and must be inferred from the data and estimated parameters.
This creates a nonlinear relationship between the data and the model’s parameters.
The
statsmodelsmodule has a way to define an MA model and estimate its parameters.The general model is Autoregressive Integrated Moving Average Model, or ARIMA(\(p,d,q\)), of which MA(\(q\)) is a special case.
The argument
order=(p,d,q)specifies the order for the autoregressive, integrated, and moving average components.See statsmodels for more information.
# ARIMA model
from statsmodels.tsa.arima.model import ARIMA
# Define model
mod = ARIMA(df['MA(3)'],order=(0,0,3))
# Estimate model
res = mod.fit()
summary = res.summary()
# Print summary tables
tab0 = summary.tables[0].as_html()
tab1 = summary.tables[1].as_html()
tab2 = summary.tables[2].as_html()
# print(tab0); print(tab1); print(tab2)
| Dep. Variable: | MA(3) | No. Observations: | 501 |
|---|---|---|---|
| Model: | ARIMA(0, 0, 3) | Log Likelihood | -700.202 |
| Date: | Wed, 05 Feb 2025 | AIC | 1410.405 |
| Time: | 14:24:16 | BIC | 1431.488 |
| Sample: | 0-501 | HQIC | 1418.677 |
| coef | std err | z | P>|z| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| const | -0.1391 | 0.125 | -1.114 | 0.265 | -0.384 | 0.106 |
| ma.L1 | 0.6199 | 0.033 | 18.713 | 0.000 | 0.555 | 0.685 |
| ma.L2 | 0.5248 | 0.037 | 14.251 | 0.000 | 0.453 | 0.597 |
| ma.L3 | 0.6949 | 0.034 | 20.158 | 0.000 | 0.627 | 0.762 |
| sigma2 | 0.9540 | 0.064 | 14.819 | 0.000 | 0.828 | 1.080 |
| Ljung-Box (L1) (Q): | 0.09 | Jarque-Bera (JB): | 1.32 |
|---|---|---|---|
| Prob(Q): | 0.76 | Prob(JB): | 0.52 |
| Heteroskedasticity (H): | 1.08 | Skew: | 0.08 |
| Prob(H) (two-sided): | 0.61 | Kurtosis: | 2.80 |
Invertibility of MA(\(1\))#
Suppose \(y_t = \varepsilon_t + \theta \varepsilon_{t−1}\) and \(|\theta| < 1\).
Rearrange to get \(\varepsilon_t = y_t - \theta \varepsilon_{t−1}\), which holds at all points in time, e.g.,
\[\begin{align*} \varepsilon_{t-1} &= y_{t-1} - \theta \varepsilon_{t−2} \\ \varepsilon_{t-2} &= y_{t-2} - \theta \varepsilon_{t−3} \end{align*}\]Combine these (i.e., recursively substitute) to get an \(AR(\infty)\) Model
\[ \varepsilon_t = y_t - \theta y_{t-1} - \theta^2 y_{t-2} - \theta^3 y_{t-3} - \cdots = y_t - \sum_{j=1}^\infty \theta^j y_{t-j} \]or
\[ y_t = \sum_{j=1}^\infty \theta^j y_{t-j} + \varepsilon_t \]The innovation, \(\varepsilon_t\) (something unobservable), can be “inversely” expressed by the data, but that’s only possible if \(|\theta| < 1\).